




HOME ハンド&チャック ロボット周辺機器 > TECH NOTE > ハンドチャック/ロボットハンドとは
ハンドチャック/ロボットハンドとは
ページ作成日:2025.11.5
最終更新日: 2026.2.11
目次
1.ハンドチャック/ロボットハンドの役割
ハンドチャック(ロボットハンド)とは、エンドエフェクタの1種で、産業用ロボットやローダーなどの
搬送装置の先端に取り付け、ワークをクランプ搬送するための機器です。

ハンドチャック/ロボットハンドは他にも、エアーチャック、エアーグリッパー(単にグリッパーとも)、
ロボットチャックなどの呼び方がありますが、このページではハンドチャックの名称で統一します。
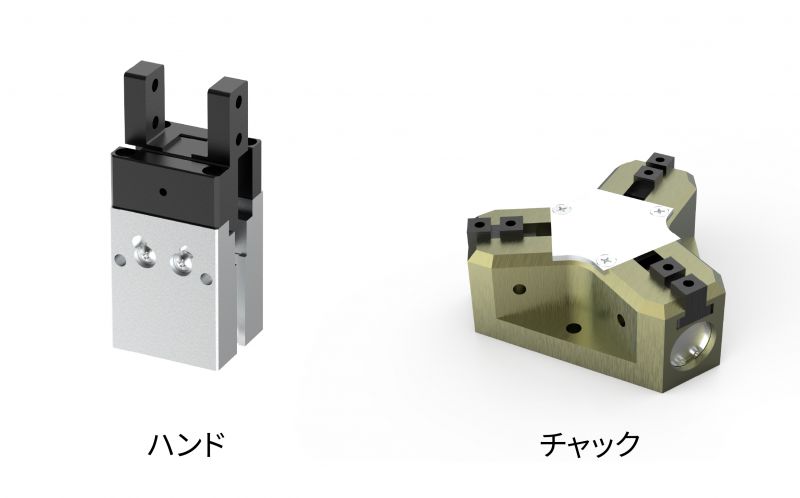
2.ハンドとチャックの違い
ハンドチャックは爪の数によって、呼び方が異なります。
2爪のもの・・・ハンド
3爪・4爪のもの・・・チャック
KONSEIのハンドチャックは用途に応じて選定頂けるよう、様々な形状の製品をラインナップしており、
更に細分化すると、下図の6種類に分類されます。

3.それぞれの製品の特長
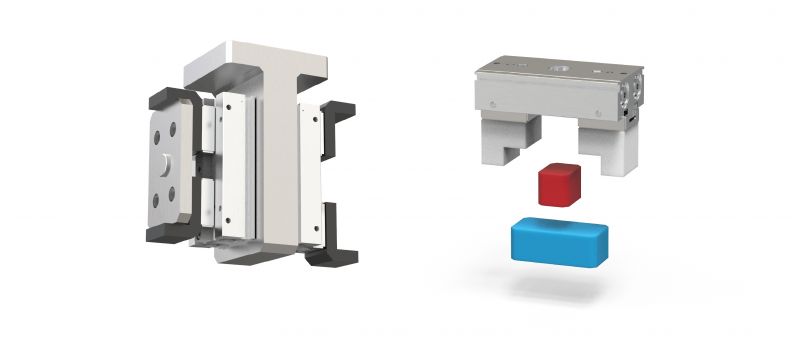
3-1.平行ハンド
平行ハンド(縦型)
スタンダードな2爪ハンド。ボディの奥行が小さいので、複数配列に最適。

平行ハンド(横型)
全高を抑えた2爪ハンド。薄型で背面合わせに対応、またストロークが長いのでワークの兼用にも対応。
3-2.支点ハンド
爪が揺動開閉する2爪ハンド。上下移動なしでワークのクランプ/アンクランプが可能。
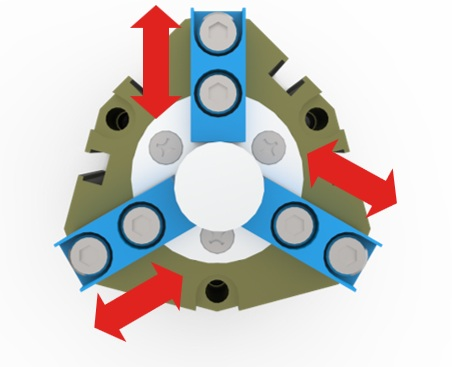
3-3.チャック
3爪チャック(縦型)
スタンダードな3爪チャック。爪が求心動作し、丸形のワークでも安定した把持が可能。
3爪チャック(横型)
全高を抑えた3爪チャック。薄型なので背面合わせに対応。
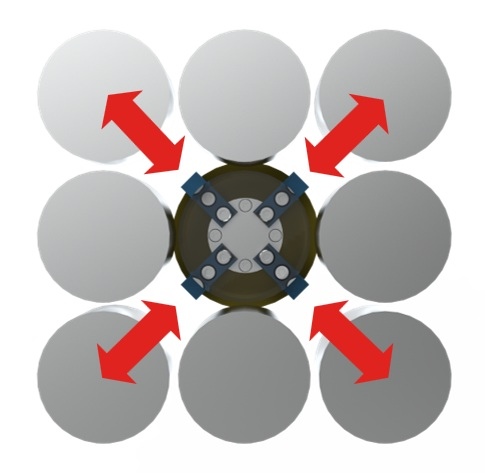
4爪チャック
4隅の隙間に爪を進入させることが可能。円形ワークが密に並べられている場合に最適。
4.ハンドチャックの駆動源
ハンドチャックは駆動源によってエアーハンド(エアーチャック)、電動ハンド(電動チャック)、
メカハンド(メカチャック)の3種類に分けられます。
4-1.エアーハンド(エアーチャック)
仕組み:圧縮空気をシリンダ内部に入力することで開閉動作
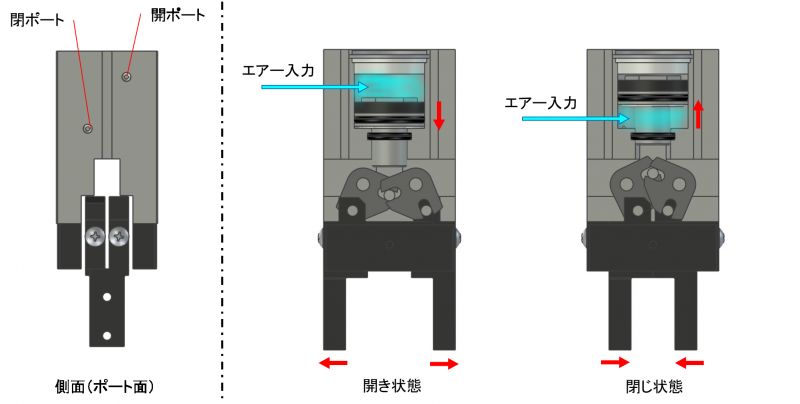
エアーハンドの特長1:シンプルな構造なので、コンパクトで高い把持力を出しやすい
エアーハンドの特長2:工場エアーを駆動源とするので導入が比較的容易
4-2.電動ハンド(電動チャック)
仕組み:電力・信号を入力することで開閉動作
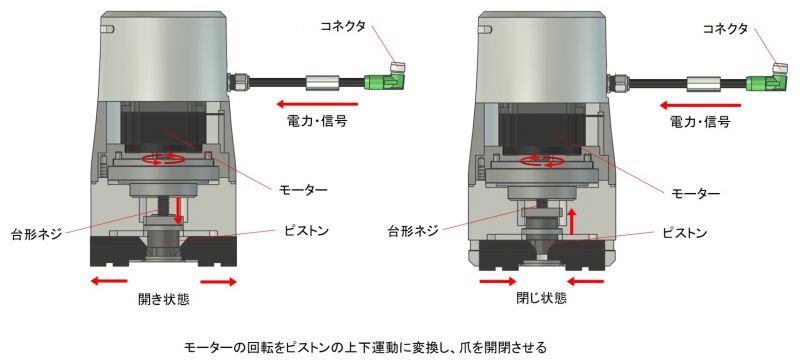
電動ハンドの特長1:モーターの制御により把持力調整や中間停止など複雑な動作が可能
電動ハンドの特長2:エアーを使用しないためコンプレッサや配管作業が不要。また、カーボンニュートラルに対応。
4-3.メカハンド(メカチャック)
仕組み:シリンダなどでピストンを直接押すことで開き、スプリング力で把持
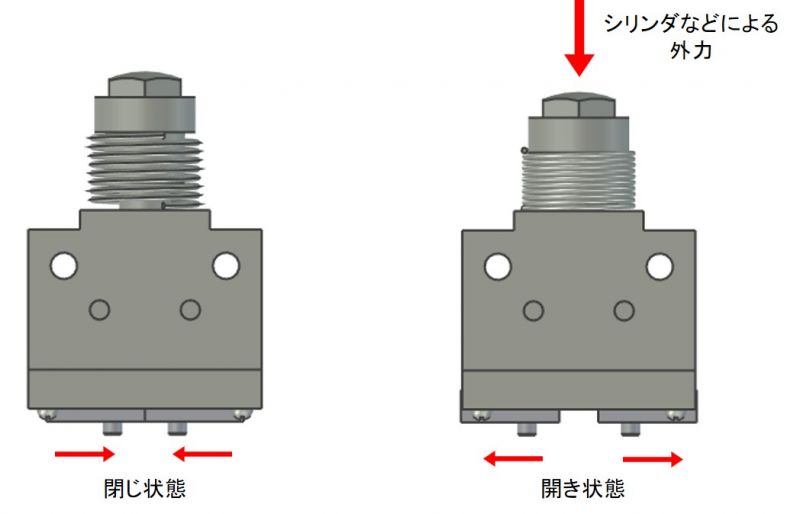
メカハンドの特長1:搬送中にエアーや電気が使えない装置で使用可能。
メカハンドの特長2:カム駆動などの高速タクトにも対応。
5.事例紹介
近藤製作所では、約1,000機種のハンドチャックをラインナップしており、様々な工程の搬送に対応しています。
実際の事例をいくつかご紹介させて頂きます。
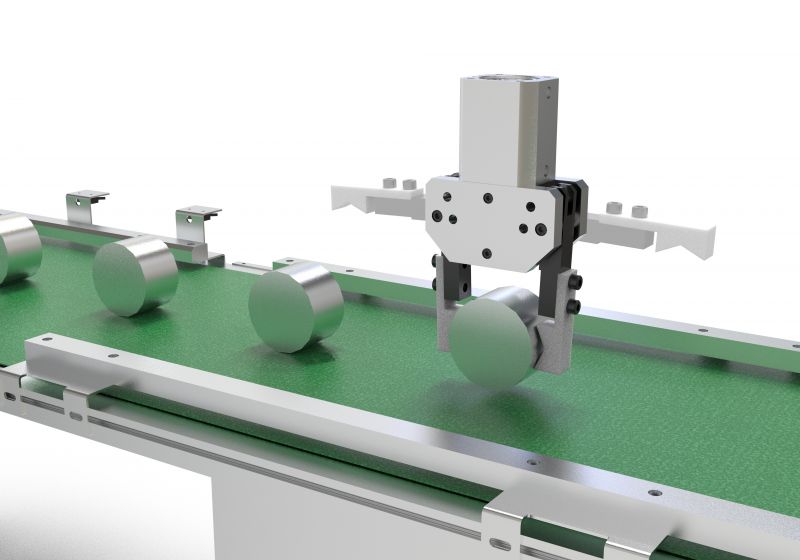
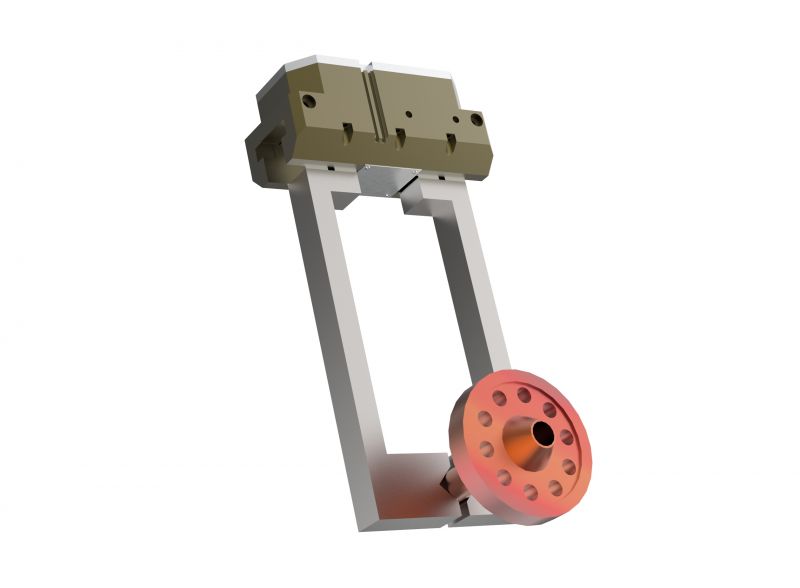
Case1 ロング爪を用いたバラ積みピッキング
クロスローラガイド搭載でロング爪に対応、ワーク入りの容器に爪のみを進入させてのクランプが可能。
自動車部品の素材などのランダムに積まれたワークの取り出しで採用されています。

Case2 切削液が掛かる加工機への供給・取り出し
爪部にパッキンを内蔵し、切削水の流入を抑制することで製品の寿命が向上。
自動車部品などの切削工程や研磨工程で採用されています。


>>加工機への供給取り出しに最適な「耐切削水ハンド」の詳細はこちら
>>加工機への供給取り出しに最適な「耐切削水チャック」の詳細はこちら
Case3 鋳造工程で800℃以上のワークの搬送
ロング爪対応の大把持力ハンドのパッキンとグリスを耐熱性のものに変更し高温のワーク搬送に最適化。
ロング爪で本体を熱源から遠ざけ、離型剤の付着も防止できるため、鋳造の取り出し工程で採用されています。
Case4 重量物の落下防止対策
シリンダ内部の強力なスプリングによるワーク落下防止機構を搭載。
停電などのエアーダウン時でも把持力が発生するため、重量物の搬送工程などの安全対策で採用されています。

>>重量物搬送工程の安全対策に最適な「大把持力ハンド(落下防止)」の詳細はこちら
>>重量物搬送工程の安全対策に最適な「大把持力チャック(落下防止)」の詳細はこちら
お問い合わせ
お問い合わせ・ご相談はこちらから
「どんなハンドが最適か?」「希望の特注仕様は可能か?」などの技術的なお問い合わせや、
製品のお見積りや取扱店などの購入に関するご相談、その他ご不明な点がございましたら
お気軽にお問い合わせください。
お問い合わせフォームへ
