




HOME > ハンド&チャック ロボット周辺機器 > ロータリージョイント
ハンド&チャック ロボット周辺機器リスト
ロータリージョイント

パラレルリンクロボット用ロータリージョイント
RJH
パラレルリンクロボットの配管のよじれ・からみ防止!

■4系統のエアー配管が絡むことなくスムーズな回転を実現!
■パラレルリンクロボットに直接取付可能な固定用ボルトを内蔵
(M4ボルト、4本、P.C.D20)
■パラレルリンクロボット特有の高加速度に対応。
■デモ動画
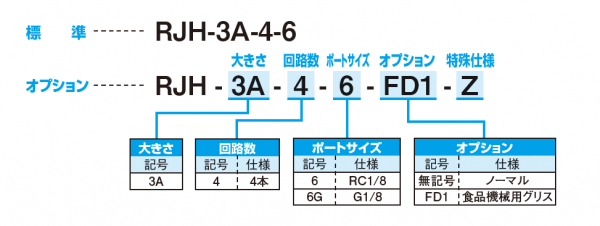
型式表示方法
仕様
表はスライドします →
| 型式 | RJH-3A-4-6 | RJH-3A-4-6G | |
|---|---|---|---|
| ポートサイズ | RC1/8 | G1/8 | |
| 周囲温度(℃) | 5~60 | ||
| 回転角度 |
エンドレス |
||
| 許容回転数(min⁻¹) | 200 | ||
| 可搬質量(kg) | 3 | ||
| 許容モーメント | 曲げ(N・m) | 14.5 | |
| ねじり(N・m) | 6.8 | ||
| 回転抵抗(N・m) | 0.26 | ||
| エアーポート | 回路数 | 4 | |
| 使用圧力範囲 | -100kPa~0.7MPa※ | ||
| 最小断面積(mm²) | 19.6(φ5相当) | ||
| 本体質量(kg) | 0.29 | ||
※真空保持はできません
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| RJH-3A-4-6 | Z:特殊仕様 |  | |
| RJH-3A-4-6G | Z:特殊仕様 | | |
