




HOME > ハンド&チャック ロボット周辺機器 > ユニット商品
ハンド&チャック ロボット周辺機器リスト
ユニット商品
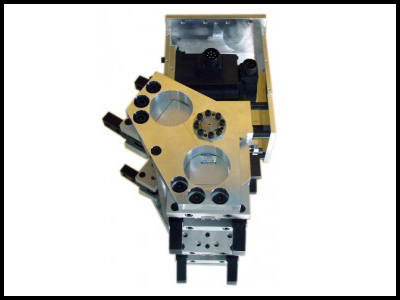
高速旋回Wチャックユニット
EXJ
サーボモータ駆動によるスイング旋回ユニット。
■旋回時間0.6秒。
高速旋回時に発生する衝撃・振動をサーボモータで制御。サイクルタイムの大幅短縮を実現いたします。
■シャフトワーク対応。
2個のハンドで長尺ワークを安定してクランプ。120度スイング式のため、省スペースなローディング・アンローディングが可能。
■スキマ調整機構付。
回転軸のガタ調整が可能で高耐久性。メンテナンスが簡単に行えます。
■ハンド・モータ変更可。
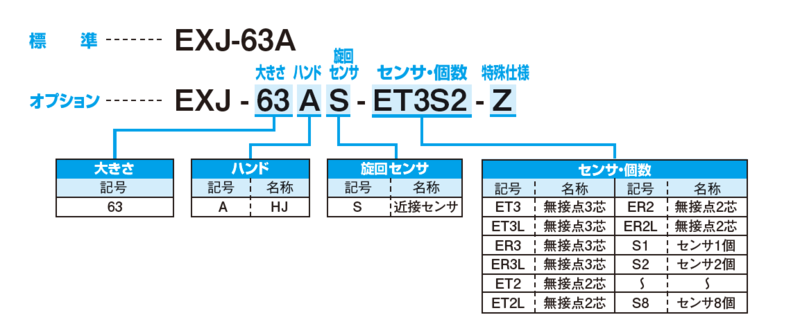
特殊対応でハンド(HJ-63AS)・サーボモータ(三菱製HC-SFS-102B)を変更いたします。お問い合わせください。
※サーボアンプはお客様手配になります。次の型式からお選びください。( サーボアンプ型式三菱製MR-J2S-100Aまたは100B または100CP)
型式表示方法
仕様
表はスライドします →
| 型式 | EXJ-63A | |
|---|---|---|
| 駆動源 | 旋回 | AC100V( サーボモータ) |
| ハンド | エアー0.3~0.7MPa | |
| 潤滑 | 旋回 | 極圧添加剤入り潤滑油(VG150) |
| ハンド | 無給油又はタービン油1種(VG32) | |
| 周囲温度 (℃) | 5~60 | |
| 旋回時間 | 0.6sec以上/120° | |
| 対象ワーク質量 (kg) | 20 | |
| 対象ハンド型式 | HJ-63AS× 4台 | |
| 開き角度 | -3°~28° | |
| 把持力(P=0.5Mpa) | 8000N | |
| 本体質量 (kg) | 45 | |
※対象ワーク質量は爪の長さにより変わります。対象ハンド型式の把持力からご検討ください。
ダウンロード
カタログ(仕様書・寸法図)
カタログダウンロード| 型式規格 | オプション | DXFデータ | STEP、IGESデータ |
|---|---|---|---|
| EXJ-63A |  | |
